Проектирование беспилотного летательного аппарата А-4 «Альбатрос» началось во второй половине 90-ых годов двадцатого века. Для его создания были поставлены определенные задачи, прежде всего они касались повышения радиуса действия в сравнении с типом БПЛА «Ремез». Новый беспилотник обязан трудиться на расстоянии в 20 км.
Инженерам из КБ «Взлет» было нужно не только увеличивать размеры ЛА, но и применять более новые и управления и передачи мощные радиоканалы видеоизображения.
")
В составе комплекса «Альбатрос-4» остались те же конфигурации, как и у «Ремез-3». Но неспециализированный внешний вид и все оборудование очень сильно изменились.
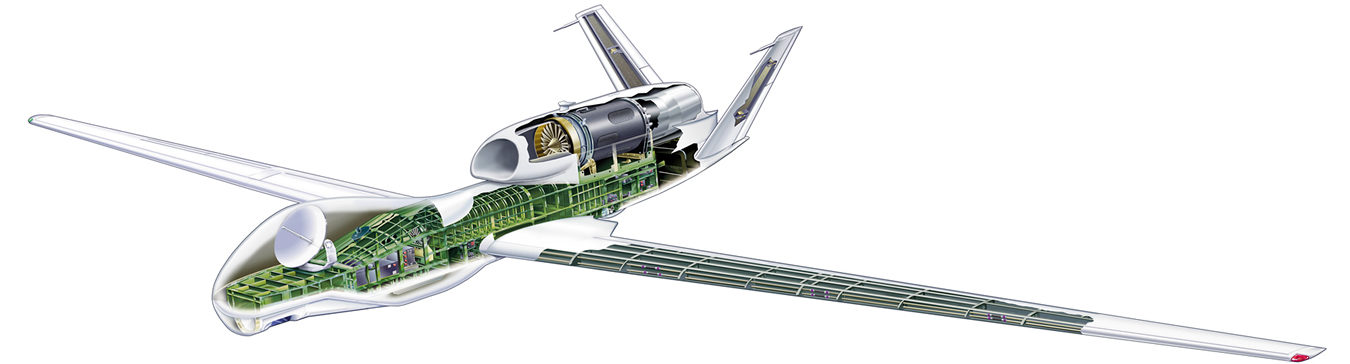
Схема А-4 «Альбатрос» хорошая – свободнонесущий моноплан с толкающим винтом. Очень сильно удлиненное крыло снабжает высокие достаточное качество и аэродинамические характеристики устойчивости самолета, независимо от того, трудится двигатель либо нет. В конструкции крыла применили закрылки, каковые улучшили взлетные характеристики БПЛА. Но одновременно с этим во всем остальном «Альбатрос» очень сильно похож на «Ремез».
В новом аппарате применили уже прекрасно зарекомендовавшие себя практические ответы. «Альбатрос» осуществляет взлет при помощи колесного шасси, для чего требуется 75-метровая ровная площадка. С некоторыми доработками возможно применять катапульту. Целый режим полета вероятен двумя методами: в ручном режиме (команда оператора) и в автоматическом. Но в обоих типах управления показания расположения и параметры траектории определяются приемником GPS-35.
По окончании обработки результаты передаются на монитор ПК, что входит в состав наземного комплекса.
При осуществлении полета вне видимости аппарата для оператора изображение ведется от установленной впереди малогабаритной камеры. Курсовая камера может эксплуатироваться при низком уровне освещенности. К примеру, в сумерках.
Достаточная устойчивость летательного аппарата при маневрировании и в полете с высокой скоростью ветра обеспечивается навигационными комплексом ПНК «Взлет».
Следить за местностью возможно при помощи камеры со сменными объективами. Камера монтируется на качающуюся платформу, которая может отклоняться по двум плоскостям командами оператора. Такая функциональность разрешает видеть объекты, находящиеся в стороне от траектории полета, наряду с этим курс БПЛА не изменяется.
Кроме этого благодаря таковой платформе «Альбатрос» может осуществлять сопровождение цели в пределах видимости.
Новинкой в А-4К есть парашютно-посадочная совокупность с принудительным выбросом купола. Парашют выпускается не машинально, а лишь по команде оператора. Но при аварийной остановки двигателя, при превышении минимальной и большой высоты полета и при отказа электропитания выпуск парашюта осуществляется машинально.
Координаты вынужденной посадки кроме этого машинально передаются на монитор оператора. Так, новая парашютная совокупность не только разрешает спасти аппарат от повреждений при посадке, но и существенно упрощает его эксплуатацию.
Посадка на колесное шасси существенно сложнее. Опробования продемонстрировали, что управлением БПЛА при посадке обязан заниматься высококвалифицированный и умелый оператор. Летно-конструкторские опробования начались в 2000 году.
Прежде всего БПЛА использовали в различных климатических условиях с различным географическим размещением.
Еще одно направление усовершенствования базисной модели относилось к установке новой совокупности управления, которая обязана реализовать всецело независимый полет по нужному криволинейному либо замкнутому маршруту на базе высокой и производительной ЦВМ. Кроме этого, в КБ проводились работы по уменьшению влияния внутренних и внешних помех на устойчивость и системы рулевых управления и работоспособность приводов.
Таким образом, для проверки летно-конструкторских черт выстроили умелый БПЛА А-4К «Альбатрос», опробования которого начались 12 декабря 2001 года. Они прошли удачно. Дополнительно на примере изучили методы применения малогабаритных фотоаппаратов с целью проведения топографических съемок. «Альбатрос» испытывается до сих пор.
А-4К Альбатрос. Характеристики:
| Модификация | А-4К |
| Размах крыла, м | 2.475 |
| Протяженность, м | 1.425 |
| Высота, м | |
| Масса, кг | |
| безлюдного | |
| большая взлетная | 23.0 |
| нужной нагрузки | 3.0 |
| топлива | 2.0 |
| Тип двигателя | 1 ЭД |
| Мощность, кВт | 1 х 2.3 |
| Крейсерская скорость, км/ч | 58-105 |
| Практическая дальность, км | |
| Радиус действия, км | 5-20 |
| Длительность полета, ч | 2 |
| Практический потолок, м |
Другие БПЛА
Самолеты
БПЛА А-4К Альбатрос www.kbvzlet.com
Увлекательные записи:
Похожие статьи, которые вам, наверника будут интересны:
-
Многоцелевой самолет-амфибия а-40 «альбатрос».
Разработчик: ОКБ Бериева Страна: СССР Первый полет: 1986 г. В первой половине 70-ых годов двадцатого века конструктора Таганрогского машиностроительного…
-
Страна: Россия Производитель: Ижорский завод Конструктор: Б.В.Голубов, Д.С.Сухоржевский Первый полет: осень 1912 г. Тип: мягкий. Успешные полеты…
-
Разработчик: Студенческое КБ КнАПИ Страна: СССР Первый полет: 1971 г. В студенческом КБ политехнического университета Комсомольска-на-Амуре (КнАПИ)…
-
Комплекс воздушной тактической разведки ВР-3 «Рейс» с БЛА Ту-143 многоразового применения проектировался в 60-х годах и был завершён в 168 году…
-
Летательный аппарат BAe PHOENIX, что был сконструирован конструкторами Англии, являет собой оперативно-тактический БПЛА с целью проведения…
-
Отто вебер: caproni «maestrale» — убедительное доказательство
Эта статья есть своебразным продолжением темы, поднятой в статьях Оружие храбрых. Часть 3 Незадолго до ВОВ и Элегантный неудачник. Легкий бомбардировщик…